
November 20, 2025
Technical Guide for Accelerating Outdoor Autonomous Mobile Robot (AMR) Development
Challenges in Outdoor AMR Development
Outdoor autonomous mobile robots (AMRs) face a uniquely demanding set of engineering constraints. These systems must navigate large, unstructured areas where terrain changes constantly. GNSS visibility can shift minute to minute. Lighting conditions are often inconsistent. Wireless coverage is frequently sparse or unreliable. Unlike indoor robots in controlled spaces, outdoor AMRs face rapidly changing and unpredictable conditions.
Meeting these requirements places significant pressure on the compute, sensing and communication architecture. AMRs must run LiDAR and stereo-vision processing, perform sensor fusion, manage motion planning, and interface with real-time motor controllers, all on low-power hardware and without depending on cloud connectivity. At the same time, they must maintain long-range wireless links for telemetry and RTK corrections, and achieve centimeter-level positioning accuracy to prevent drift over large distances.
Engineering teams also face the challenge of stitching together fragmented ecosystems of sensors, radios, GNSS receivers, and motor controllers. Teams often spend months integrating these components, writing drivers and tuning communication layers before they can validate autonomous behavior in the field.
This article examines how the Gateworks VeniceFLEX SBC, paired with Wi-Fi HaLow and <2 cm u-blox ZED-F9P GNSS, forms a unified and rugged foundation for outdoor AMR development, one that maintains deterministic on-board compute, long-range connectivity, and high-precision localization while significantly accelerating R&D timelines.
System Overview
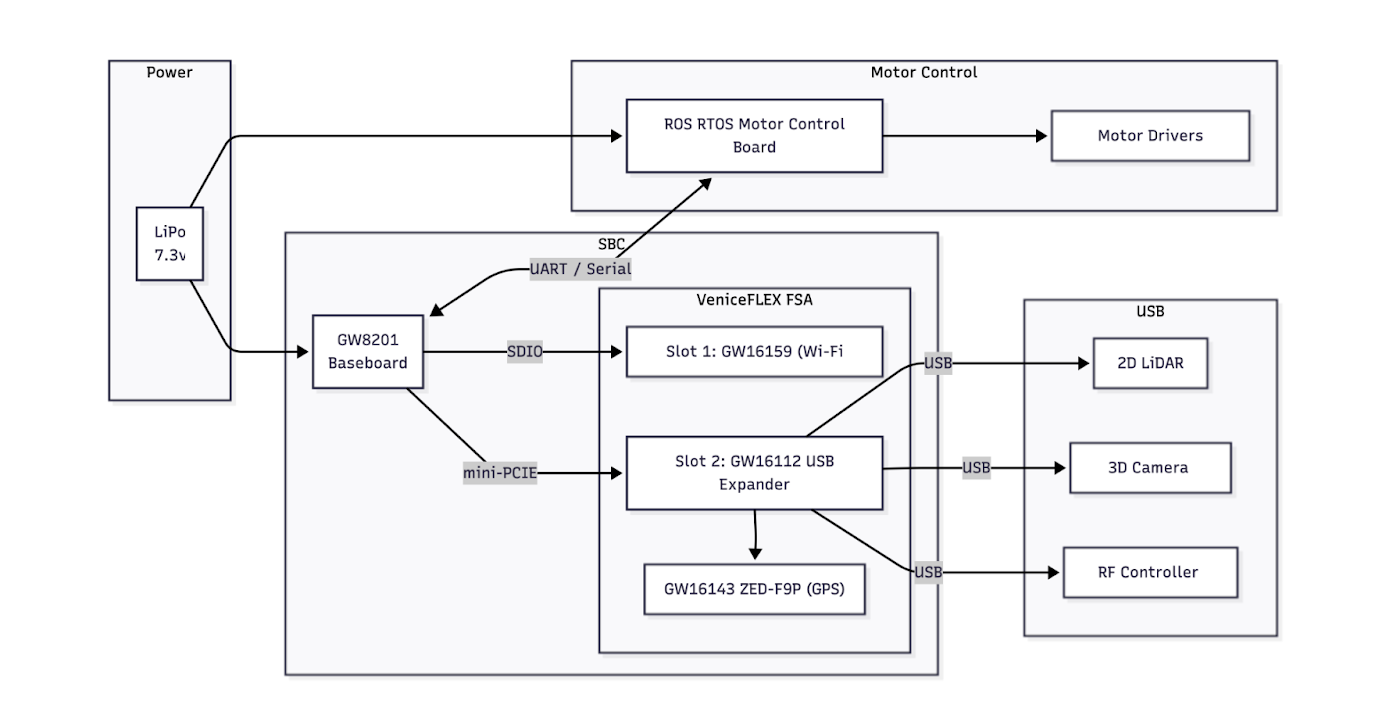
Gateworks has engineered a compact autonomous vehicle to demonstrate rugged AMR innovation with real-world, industrial-grade systems. At its core is the Gateworks VeniceFLEX SBC, combining centimeter-level (<2 cm) u-blox GNSS precision, long-range sub-GHz HaLow Wi-Fi by Morse Micro, edge vision powered by the i.MX8MP CPU and advanced LiDAR and stereoscopic vision sensing. Gateworks’ Flexible Socket Adapters (FSA) allow for both GNSS and HaLow integration and make them directly accessible from Linux. The VeniceFLEX acts as an edge processor and mission planner, working alongside a dedicated RTOS motor controller to handle real-time/critical controls.
ROS Autonomous Mobile Robot Hardware Diagram
Gateworks SBCs provide a rugged platform for edge processing on a higher level, providing a foundation for vision-processing programs, factory automation control, drone control, edge processing and communication.
Hardware Platform: VeniceFLEX SBC and Expansion Architecture
This AMR Demo showcases a robust hybrid platform: the VeniceFLEX SBC running ROS2 (Robotic Operating System) for high-level processing, including motion and kinematic planning, vision inference, and user interface management. It also uses a dedicated microcontroller with RTOS capabilities for control systems.
One of the most compelling aspects of this platform is its hardware flexibility. The same computing framework and technology stack can scale seamlessly from compact drone systems to full-sized autonomous agricultural machines. Gateworks provides the robust foundation for low-power edge computing with the rugged VeniceFLEX and location/connection peripherals.
This demo is based on community-supported and open-source platforms to help accelerate R&D. Let’s take a closer look at the engineering specifics.
Materials List
- 1x GW16159 Wi-Fi HaLow M.2 Card ( Morse Micro MM6108)
- 1x GW16143 u-blox GNSS/GPS Card (u-blox ZEDF9P)
- 1x GW16112 Mini-PCIe USB Expansion Card
- 1x VeniceFLEX GW8200-S20-F1P0-F2E0

Developer Access and Linux Environment
The VeniceFLEX SBC runs a full Linux environment, allowing developers to access the system directly via SSH or JTAG Serial. This architecture makes the demo ideal for R&D environments where modular software testing and rapid iteration are required. Learn how to interface the board through JTAG, Serial and SSH on the Gateworks Getting Started Wiki page.
Software Architecture: ROS 2, MicroROS and Data Distribution
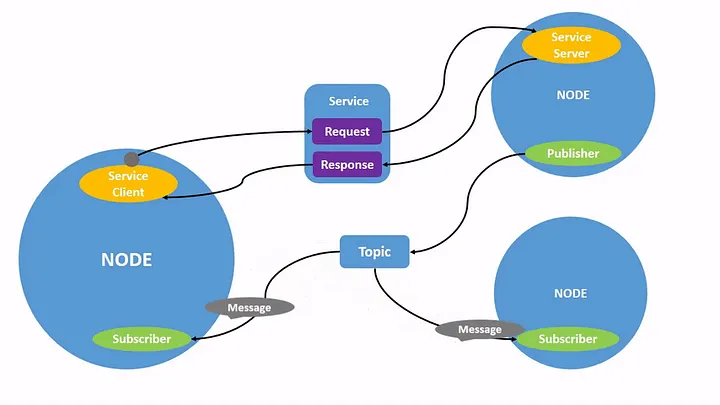
The Linux system runs an instance of ROS2, an industry-grade open-source software. Contrary to the name, ROS2 is not an operating system like Linux, which serves many purposes. ROS 2 delivers powerful data-distribution capabilities that make it extremely useful in robotic and industrial scenarios. It provides a uniform and reliable way to exchange data between processes or “nodes,” with granular control over how that data is sent. ROS 2 also moves data outside the Linux system and across networks to other computers or microcontrollers using various protocols.
In this demo, reliable data transfer is necessary for robust operation for internal node communication and for critical wireless signals such as RTK Corrections and mission planning. This is done by configuring certain Quality of Service (QoS) settings in ROS2, which can be read about here: Quality of Service Settings. Other services, such as live PointCloud data being sent wirelessly for remote monitoring, were configured at varying QoS levels.
Sensor Integration: LiDAR, Stereo Vision and Edge AI
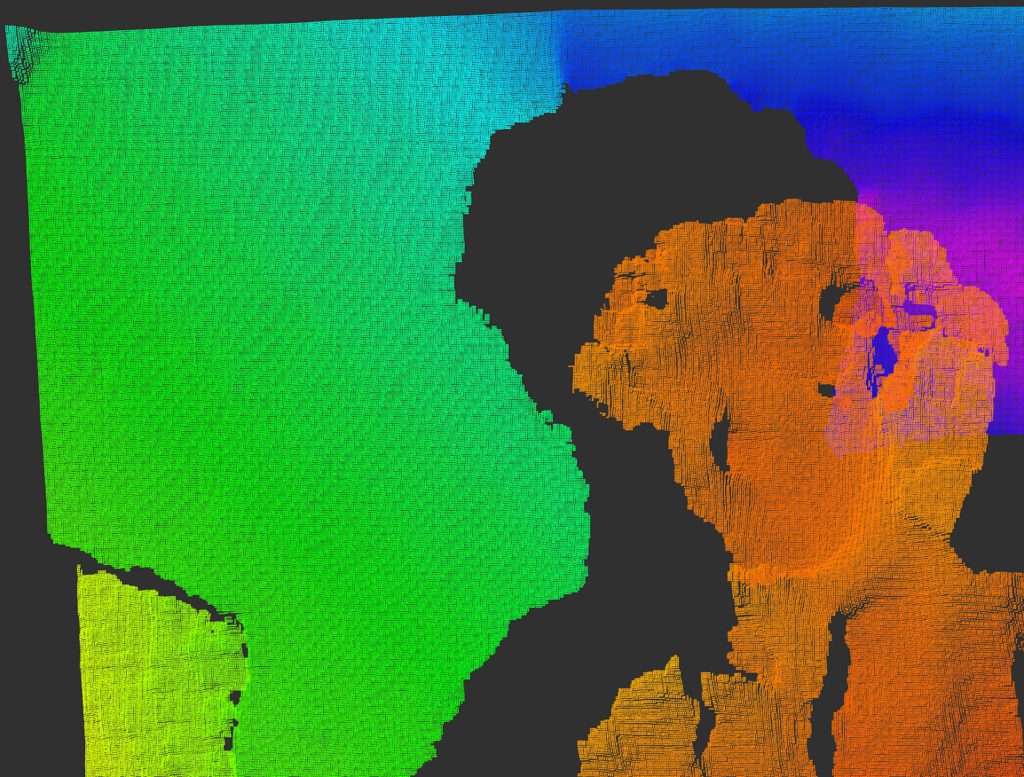
In the AMR demo, ROS2 natively accepts GNSS data from the GW16143 (<2cm u-blox) while also accepting PointPerfect RTK data through HaLow on native Linux interfaces. ROS2 also combines LiDAR and camera data to create Point Clouds, rendered in RViz2, as shown below. Further instructions on setting up peripherals with the VeniceFLEX will be provided below.
ROS2 has a multitude of community-created nodes that serve as higher-level drivers for devices such as stereoscopic cameras or u-blox GPS devices. One example is the ability to combine GNSS data with other IMU data with a Kalman filter to have even higher precision + confidence than one stream of data alone. This showcases one of the largest advantages of leveraging open-source to accelerate robotic development: State Estimation Nodes – Robot Localization. Engineers often implement reliable device integration upfront.
Real-Time Control: RTOS Motor Controller Integration
The VeniceFLEX running ROS 2 doesn’t interface with the motors directly; instead, it communicates through an abstraction layer provided by the motor controller. A wide range of motor controllers can be used depending on application requirements and certification needs. For example, drone platforms often employ hardware such as Pixhawk, running either open or closed-source autopilot software.
In this demo, ROS 2 communicated with the motor controller using MicroROS. This had the motor controller running a lightweight version of ROS and communicating over UART. Gateworks boards natively support many different protocols, including CAN. You can find specific information about the various serial interfaces provided on Gateworks boards on the Serial wiki page.
ROS 2 supports multiple message formats to maintain continuous, reliable communication between the motor controller and the main compute system. A key advantage of using a Linux-based platform is the ability to integrate advanced services such as u-blox PointPerfect Flex. This adds centimeter-level (<2cm) GNSS correction, alongside compute-intensive edge-vision algorithms that are infeasible to run directly on microcontrollers. This hybrid approach enables high-precision control, autonomous mission planning, and on-device decision-making, all within a flexible, modular framework.
Power and Environmental Considerations
Reliable performance in industrial, agricultural and outdoor environments is a key consideration when creating AMRs. Designed for field operation, the AMR platform demonstrates the rugged performance of Gateworks hardware. The VeniceFLEX SBC supports a wide DC input range and low power consumption. This enables many hours of operation even on compact lithium battery packs. Gateworks engineers and validates each SBC to meet compliance standards for physical vibration, shock, and electrical disturbances. Power characterization data is available for the entire Venice family.
Connectivity Stack: Long-Range Communication with Wi-Fi HaLow
The GW16159 M.2. E-Key Wi-Fi HaLow radio enables the AMR to communicate on S1G channels with standard Wi-Fi protocols over SDIO. Since ROS2 is software that runs on Linux (or virtualized in a container) setup is trivial outside of generic steps. On the VeniceFLEX, the M.2. The E-Key slot will be provided by the FSA with SDIO lines on the GW16FE0. FSA Guide here. After inserting the GW16159, confirm proper installation and perform benchmark testing as described on the GW16159 wiki page.
High-Precision Localization: <2 cm GNSS with u-blox ZED-F9P
The GW16143 High Precision GNSS/GPS card is a Mini-PCIe-based card with a u-blox ZED-F9P. To use the GW16143 on the VeniceFLEX with FSA, use a GW16FP0 to expose a Mini-PCIe header. Insert the GW16143 into the Mini-PCIe slot, then use the following guide to ensure the device can be interfaced via Linux. Optionally, one can use a Mini-PCIe USB expander such as the GW16112 to connect other peripherals, such as a depth camera or LiDAR, and place the GW16143 on top.
Once the GW16143 is accessed through Linux, higher-level processes such as u-blox’s uconnect or Linux interfaces like gpiod can configure the device and application. The GW16143 wiki page also covers implementing PointPerfect RTK for <2cm GNSS data, and in the AMR demo specifically, a ROS2 node from a well-supported community source was used to expose the device as a node for robust configuration and IMU integration with other ROS systems. See the KumarRobotics/ublox GitHub for highly in-depth examples and tutorials.
Conclusion & Next Steps
After all hardware is set up and accessible through ROS2, continue to leverage community nodes to develop high-level software and iMX8MP-neural accelerated vision pipelines to complete whatever mission your project requires. This AMR demo illustrates how a unified hardware and software stack can overcome the core challenges of outdoor robotics, ranging from localization drift and unreliable wireless coverage to high edge-compute demands and real-time motor control.
For engineering teams, the value of this approach is twofold:
- A reliable foundation for outdoor AMRs, with ROS 2, MicroROS, and standardized drivers that reduce integration complexity.
- Accelerated development timelines, enabling faster bring-up, earlier field trials, and smoother progression from prototype to production hardware.
Developers interested in building their own outdoor AMR, whether for agriculture, mining, logistics, inspection, or research, can use this demo as a reference architecture. The Gateworks wiki provides detailed hardware guides, ROS integration examples, and configuration steps for HaLow, GNSS, and sensor interfaces. Evaluating the VeniceFLEX SBC or its compatible radios and GNSS modules is a practical first step toward developing a robust and scalable autonomous system.
If you would like guidance on hardware selection, integration strategies, or adapting this architecture to your specific robotics application, our engineering team is available to support your development path.
Watch our Webinar about Accelerating AMR Development for Extreme Environments HERE.
VIEW ASSOCIATED PRODUCTS